Lab 1
Lab 1: Search, deadline: 1/5
Search Algorithms
In this lab, you will implement four “different” (directed) graph search algorithms in python:
- Breadth-First Search
- Depth-First Search
- Greedy Search
- A*
Each of these algorithms takes a graph, represented as an initial node that can produce its neighbors, and a goal predicate/function that tells you when you have reached a goal node. The last two algorithms additionally get a heuristic that tells you how close a node is estimated to be to the goal.
To get started download this zip file, which contains two python files: pathfinding.py and graph.py. You only have to modify pathfinding.py, but you can and should
use graph.py to come up with more test cases!
The graph representation is implemented in graph.py, and does not have to be modified. If you want to modify graph.py, please do not
change Node and Edge and their interfaces. When in doubt what you can change, ask. For this task, you only have to implement four functions: bfs(start, goal), dfs(start, goal), greedy(start, heuristic, goal)
and astar(start, heuristic, goal).
The result of each of the functions should be four values:
- The path, represented as a sequence of
Edgeobjects - The total length of the path
- The number of nodes visited, i.e. added to the frontier, during search
- The number of nodes expanded, i.e. removed from the frontier, during search
If no path is found, the first two values should be
None, but the number of visited and expanded nodes should still be reported.
Note that all four functions have the same basic structure, and only differ in how they select which node to expand next, i.e. which data structure they use for the frontier. You could implement a base search function
and pass it the appropriate data structure to get each of the four algorithms, or you can implement them individually.
As mentioned above, the graph is not represented explicitly, instead only a single Node object is passed to the algorithm, which has a method get_neighbors which returns a list of Edge objects representing
outgoing edges. Each Edge object stores its target, the cost to use the edge, and its name (used for printing the path). The target is another Node object, which can then in turn be asked for its own neighbors,
and so on. Note that to simplify development, nodes do not need to be cached between calls, and are instead identified by a unique id, which can be obtained from the get_id method. graph.py shows how this
representation can be used to represent finite and infinite graphs.
Mandatory functions in pathfinding.py, following the API described there (and above):
bfsdfsgreedyastar
Do not remove or change the default_heuristic in pathfinding.py.
In your report, note how the different algorithms perform on the given examples. Which visits/expands the least nodes, which one finds the shortest path? Come up with at least one graph of your own and test the four
algorithms on it. Try to define a reasonable heuristic, and see how it affects performance (use the run_all function, which will run greedy search and A* with the default heuristic as well as with the provided heuristic).
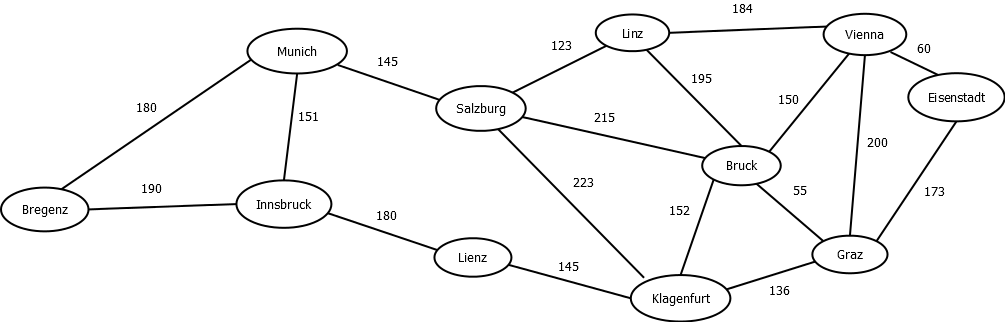
The Austria graph follows this approximate map:
Submission
Send the finished code (all python files you have!), and your report pdf in a zip file by email to me and Christian (markus.eger.ucr@gmail.com,
aiexistencialrisk@gmail.com). Use [CI-0129]Lab 1, carné 1 carné 2 as the subject line. Do not forget to put the names and
carné’s of both team members in the report as well!